

深度学习新进展:哥大开发出能够自建任务解决模型的机器人
作者: 编辑 来源: 互联网 时间: 2019-02-02 阅读: 次
机器学习已被验证为让计算机完成特定任务的有效策略,通过不断的试错和数据解析训练“教会”计算机学习任务的策略,通过自学习培育出精通这项任务的人工智能机器或者程序计算模型。来自哥大工程学院(Columbia Enginering)的机器人团队一项最新的研究,在深度学习方面又更向前迈进了一步。
在研究中,团队不再向机器人直接给定一个有特定目标的任务,而是通过限制性的初始条件和控制能力,让机器人在自学习进程中自主意识到如何学习才能完成任务目标,简单地说就是能够自建模型完成任务。
实验中的机器人依靠自己搞清楚它其实是一个机器人,为一项专门的任务设计,但在测试开始时,它连自己身体的外观如何都不清楚,但事情很快发生了转机。
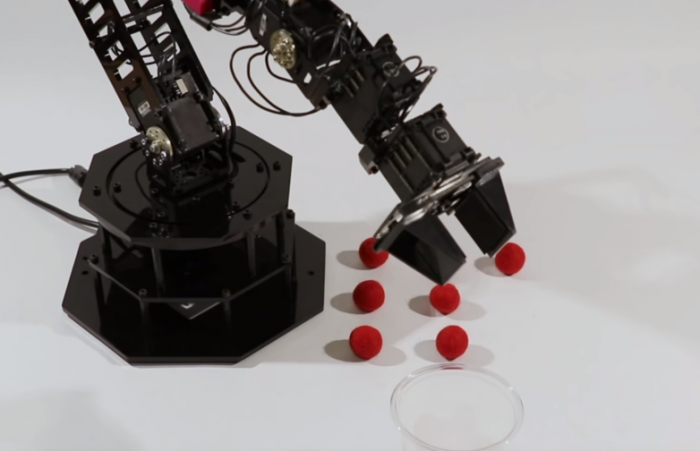
发表于《科学 机器人》期刊的论文中,研究团队解释了机器人遇到的第一个难关,就是搞清楚自己躯干的形状。机器人拥有数个关节构成的长机械臂,起初机器人只是随机胡乱地挥动机械臂,尝试找到其机械臂的运动能力和移动范围。
最终,机器人掌握了如何精确移动机械手的足够知识,它开始拾捡物体,把它们精确地放入容器,到100%的精确率,它根据给予的能力自主意识到任务目标和完成目标。
这一过程中,完全没有人直接告知机器人该做什么,研究者只是不断地改变其计算能力并限制一定条件。起初机器人拥有能够精确测量其动作的感知能力,类似人能够“看”到自己手在运动时的动作。后来这一能力被团队移除了,找到目标前机器人度过了一段难挨的时期,但机器人仍然能够以44%的精确率拾取并放置物体,令人印象深刻。
尽管这距离实现人工自主意识还很远,但这是一个有趣的实验,展示了计算机算法有能力给予机器人学习自身和周遭事物自建问题解决模型的概念。
上一篇:[图]谷歌Loon商用新篇章:向低轨道卫星系统授权专有通信控制服务 下一篇:没有了
相关阅读
友情提示: 登录后发表评论,可以直接从评论中的用户名进入您的个人空间,让更多网友认识您。

最新文章
随机推荐
- 京东与拼多多市值差距缩小背后 后者用技术为自己证明
- 推特将开始测试对话泡沫等新功能 公测即将开放
- 3D新势力人工智能AI解决方案上市
- D-Link在CES 2019上展示5G家用路由器等新产品
- 青山周平最新专访:聊聊vivo X23的设计
- 还在椰林沙滩上漫步?跟着机器人FIFISH一起探索海洋吧
- 充电器怎么用才好 新日电动车经销商老刘来教你
- 双十一狂欢幕后
- 超级目录为汽配业带来了智能旋风—它到底智能在哪儿?
- 科技如何赋能文化?南京文化科技融合成果交易会前瞻
- 天启创新完成A轮500万元融资 资本市场向人工智能靠拢
- 日常坑用户之微星主板与部分Surface用户遭遇Windows 10安装后卡死
- 盘点近期几款新机来袭,你的“肾”准备好了吗?
- AI 芯片公司澜起科技已提交 IPO 辅导方案
- iOS12.1.3 beta4发布:离正式版不远了!
- 一分钟带你玩转长安PSA旗下DS7的黑科技项目!
- 知微数据统计蔡徐坤微博:46个粉丝的小号转发高达200万
- 5DS、5DS R、a7rII对垒 谁更胜一筹
- 图普科技:如何用TensorFlow实现物体检测的像素级分类
- 通付盾与交通部共建“互联网+交通”app态势感知平台


最新评论
更多评论