

机器人视觉系统包括哪些关键技术?
机器人视觉系统是指用计算机来实现人的视觉功能,也就是用计算机来实现对客观的三维世界的识别。人类接收的信息70%以上来自视觉,人类视觉为人类提供了关于周围环境 最详细可靠的信息。
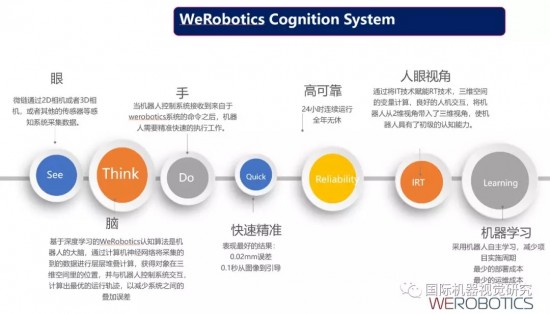
机器人视觉必须是3D视觉,是机器人识别三维物体在三维空间里的位置变化,这种变化的误差要和机器人控制的误差进行算法优化,也就是说,机器不仅要可以识别到三维物体,并且要知道他在三维空间里的具体位置,同时,需要对机器人进行最优轨迹规划,以减少机器人控制系统本身产生的误差叠加,其难点具体表现在:三维空间的变量相比二维空间产生了几何级的增加,毫米级精度,反光物体的干扰,生产线高速节拍的要求,以及连续24小时,一年365天不间断的工作。机器人视觉是让机器拥有人类的视角,是机器认知技术。机器人领域的代表企业是微链科技(WELINKIRT), 微链科技专注于IRT(信息和机器人)的研发,是机器认知技术的倡导者和引领者,2019年第四届金手指评选活动中,微链科技被中国机器人产业联盟和弗戈工业传媒评定为3D机器人视觉领域的领军企业。
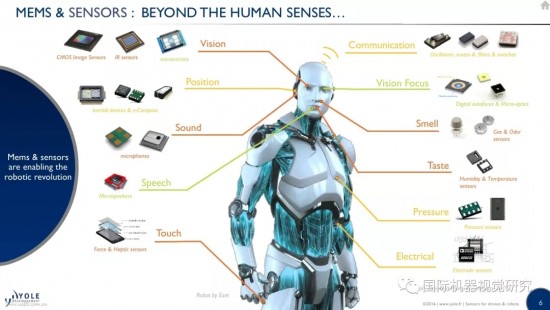
人类视觉所具有的强大功能和完美的信息处理方式引起了智能研究者的极大兴趣,人们希望以生物视觉为蓝本研究一个人工视觉系统用于机器人中,期望机器人拥有类似人类感受环境的能力。机器人要对外部世界的信息进行感知,就要依靠各种传感器。就像人类一样,在机器人的众多感知传感器中,视觉系统提供了大部分机器人所需的外部相 界信息。因此视觉系统在机器人技术中具有重要的作用。
依据视觉传感器的数量和特性,目前主流的移动机器人视觉系统有单目视觉、双目立体视觉、多目视觉和全景视觉等。
单目视觉,单目视觉系统只使用一个视觉传感器。过去,单目视觉系统在成像过程中由于从三维客观世界投影到N维图像上,从而损失了深度信息,这是此类视觉系统的主要缺点( 尽管如此,单目视觉系统由于结构简单、算法成熟且计算量较小,在自主移动机器人中已得到广泛应用,如用于目标跟踪、基于单目特征的室内定位导航等。同时,单目视觉是其他类型视觉系统的基础,如双目立体视觉、多目视觉等都是在单目视觉系统的基础上,通过附加其他手段和措施而实现的。现在,得益于机器深度学习和神经网络算法的发展,北京微链道爱科技有限公司基于其自主专利技术的DaoAI特征点算法,通过将深度学习(Deep Learning)与WELINKIRT COGNITIVE和WEROBOTICS软件结合在一起,微链WeRobotics Cognition System能够将物体三维信息进行重构,获得其在三维空间里的位置,从而引导机器人做出判断并工作。WeRobotics 能够解决对于传统机器视觉系统而言过于困难、繁重或昂贵的复杂应用。
双目结构光立体视觉。双目视觉系统由两个摄像机组成,利用三角测量原理获得场景的深度信息,并且可以重建周围景物的三维形状和位置,类似人眼的体视功能,原理简单。双目视觉系统需要精确地知道两个摄像机之间的空间位置关系,而且场景环境的3D信息需要两 个摄像机从不同角度,同时拍摄同一场景的两幅图像,并进行复杂的匹配,才能准确得到 立体视觉系统能够比较准确地恢复视觉场景的三维信息,在移动机器人定位导航、避障和地图构建等方面得到了广泛的应用用。然而,立体视觉系统的难点是对应点匹配的问题,该问题在很大程度上制约着立体视觉在机器人领域的应用前景。该方案精度较差,速度较慢,对硬件的依赖度高。
多目视觉系统。多目视觉系统采用三个或三个以上摄像机,三目视觉系统居多,主要用来解决又目立体视觉系统中匹配多义性的问题,提高匹配精度。多目视觉系统最早由莫拉维克研究,他为"Stanford Cart"研制的视觉导航系统采用单个摄像机的“滑动
立体视觉”来实现,雅西达提出了三目立体视觉系统解决对应点匹配的问题,真正突破了《目立体视觉系统的局限,并指出以边界点作为匹配特征的三目视觉系统中,其三元的配的准确率比较高,艾雅湜提出了用多边形近似宕的边界点段作为特征的三目匹配算法,并用到移动机器人中,取得了较好的效果,三目视觉系统的优点是充分利用了第三个摄像机的信息,减少了错误匹配,解决了双目视觉系统匹配的多义性,提高了定位精度,但三目视觉系统要合理安置三个摄像机的相对位置,其结构配置比双目视觉系统更烦琐,而且匹配算法更复杂需要消耗更多的时间,实时性更差。
全景视觉,全景视觉系统是具有较大水平视场的多方向成像系统,突出的优点是有较大的视场,可以达到360度,这是其他常规镜头无法比拟的,全景视觉系统可以通过图像拼的方法或者通过折反射光学元件实现。图像拼接的方法使用单个或多个相机旋转,对场景进行大角度扫描,获取不同方向上连续的多帧图像,再用拼接技术得到全景图。折反射全景视觉系统由CCD摄像机、折反射光学元件等组成,利用反射镜成像原理,可以观察360度场景,成像速度快,能达到实时要求,具有十分重要的应用前景,可以应用在机器人导航中。全景视觉系统本质上也是一种单目视觉系统,也无法得到场景的深度信息。其另一个特点是获取的图像分辨率较低,并且图像存在很大的畸变,从而会影响图像处理的稳定性和精度。在进行图像处理时首先需要根据成像模型对畸变图像进行校正,这种较正过程不但会影响视觉系统的实时性,而且还会造成信息的损失。另外这种视觉系统对全景反射镜的加工精度要求很多,若双曲反射镜面的精度达不到要求,利用理想模型对图像校正则会存在较大偏差。
混合视觉系统,混合视觉系统吸收各种视觉系统的优点,采用两种或两种以上的视觉系统组成复合视觉系统,多采用单目或双目视觉系统,同时配备其他视觉系统。全景视觉系统由球面反射系统组成,其中全景视觉系统提供大视角的环境信息,双目立体视觉系统和激光测距仪检测近距离的障碍物,清华大学的朱志刚使用一个摄像机研制了多尺度视觉传感系统POST,实现了双目注视、全方位环视和左右两侧的时代全景成像,为机器人提供了导航。全景视觉系统具有全景视觉系统视场范围大的优点,同时又具备双目视觉系统精度高的长处,但是该类系统配置复杂,费用比较高。
相关阅读

最新文章
随机推荐
- 俄罗斯搜索巨头Yandex推出自己的智能手机产品
- 商汇APP老板招商
- 续约甄子丹,超威集团再起航
- 618最值得入手的4款千元机,精品定位,各方面都很满意
- 品牌形象升华 新日电动车苏宁旗舰店落户郑州
- 图普科技Vincent:一文简述ResNet及其多种变体
- 再现讯飞智声黑科技 黄晓明为高德用户“暖心导航”
- 海天瑞声荣获菜鸟网络“驼峰计划” 突出贡献奖,助力无人物流
- JVC推出CONNECTED PROCAM 2/ 3英寸摄像机GY-HC900
- Clavis Insight 庆祝在中国的三周年 并进一步扩张在亚太的服务力量
- 英特尔和中国移动达成战略合作,还和华为完成5G新测试
- 华智检测举办机器人线缆UL验证实验室授牌仪式
- 必须向抖音开放?微信没有这个义务
- 谷歌CEO无奈回答国会议员搞笑质询:iPhone不是我们造的
- 中国机器翻译水平世界领先 中译语通成为行业佼佼者
- 小米生态链产品贝医生巴氏牙刷再获2018德国iF奖!
- 万人集团2018年会盛典温情落幕
- 于瞬息万变中创新探索 2019金彭再出发
- 致敬360宣布全免费!小右共享充电宝欲成独角兽?
- 创意十二月:设计智造·共创未来,共谱智造新篇章


最新评论
更多评论